![]() ISSN 0798 1015
ISSN 0798 1015

![]() ISSN 0798 1015
ISSN 0798 1015
Vol. 40 (Nº 32) Año 2019. Pág. 3
CABRERA, Fausto R. 1; RODRÍGUEZ, Cristian F. 2; ZABALA, Mónica A. 3 y SANTACRUZ, Fabricio J. 4
Recibido: 10/04/2019 • Aprobado: 14/09/2019 • Publicado 23/09/2019
RESUMEN: Se implementó una serie de rutinas de terapia psicomotriz para disminuir el déficit de atención en niños menores de 8 años con el humanoide NAO, las cuales se estructuran en fases que comprenden acciones como observar, caminar, interpretar e interactuar, mediante una plataforma computacional que permite el movimiento del robot sobre una trayectoria determinada. Para evaluar el desempeño del sistema se utilizaron encuestas, las cuales permitieron cuantificar y por ende calificar la funcionalidad del sistema, como resultado, se verifica la disminución de los índices de hiperactividad al ejecutar los ejercicios a los niños gracias a la interacción directa con el robot identificando la sensación que ellos experimentan al relacionarse con el mismo. |
ABSTRACT: Psychomotor therapy routines were implemented to reduce the attention deficit in children under 8 with the NAO humanoid. It is structured in phases that include actions such as observing, walking, interpreting and interacting through a computational platform that allow the robot to move on a determined trajectory. In order to determine the system functionality, an inquest was developed and applied, as result, the decrease of the hyperactivity indexes is verified when executing the exercises to the children thanks to direct interaction with the robot identifying the sensation that they experience when interacting with it. |

El trastorno por déficit de atención e hiperactividad (TDAH) es un síndrome conductual que inicia en la infancia y en diversos casos persistente hasta la adolescencia, entre las principales características se identifican: la hiperactividad, la falta de atención, la irracionalidad e impulsividad, las cuales se presentan ya sea en el hogar y/o en el ámbito académico. El TDAH es una problemática de salud mental presente en la actualidad, la cual afecta al menos del 5% al 10% de la población infanto-juvenil, siendo los más afectados el grupo de niños comprendido entre 6 y 9 años de edad. (Ortiz & Urdiales, 2010)
La robótica es una herramienta tecnológica dedicada al diseño, construcción, control, manufactura y aplicación de los robots, los mismos que ejecutan órdenes de un programa, realizan los movimientos necesarios a través de un control del proceso en tiempo real. Esto da lugar a la utilización de la robótica educativa como estrategia para fortalecer las aptitudes socioemocionales en niños con problemas de concentración y discapacidad intelectual, que promueve un nuevo formato de acercamiento al conocimiento. (Beltrán & Curicho, 2015)
La interacción entre personas y robots se ha extendido a lo largo de la comunidad mundial en los últimos años, el uso de nuevas tecnologías permite el desarrollo de terapias psicomotrices las cuales aportan una solución factible al momento de combatir trastornos prevalentes en la sociedad como el TDAH. La relación entre humanos y robots en la actualidad tiene un alto impacto, según Tekerek el desarrollo de terapias psicomotrices realizadas con robots permiten disminuir trastornos prevalentes en la sociedad de manera intuitiva y pedagógica.(Boren & Liles, 2016)
Por tal motivo se plantea en la presente investigación el desarrollo de una terapia psicomotriz con la participación directa de un robot humanoide (NAO), como instrumento de ayuda para niños con déficit de atención e hiperactividad. Los resultados que arroje la investigación permitirán en el futuro crear nuevas alternativas para la disminución de diversos trastornos por medio de robots humanoides. La implementación de técnicas de visión artificial sobre el robot NAO permite ejecutar ejercicios psicomotrices capaces de disminuir la hiperactividad presente en niños. (Beltrán & Curicho, 2015)
El trastorno de déficit de atención e hiperactividad (TDAH), es un síndrome psiquiátrico común en la sociedad, se lo reconoce por el desarrollo de actividad excesivamente anormal, poca atención e impulsividad. Puede manifestarse antes de los 7 años y se prolonga durante toda la vida si no es corregido a tiempo. Las causas y tratamiento son diversos como muestra en la Fig. 1.
Fig. 1
Trastorno de déficit de atención e hiperactividad (TDAH)
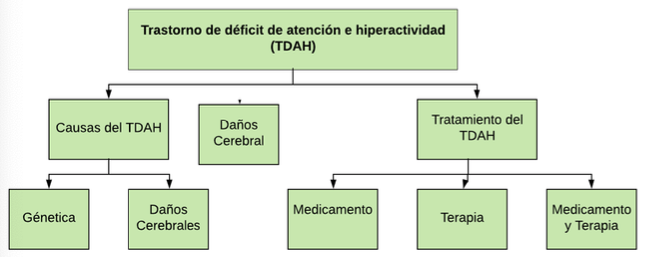
Se ha subdividido en 3 categorías: la primera categoría impone la hiperactividad e impulsividad del individuo, la segunda se refiere a palpar la falta de atención en una actividad determinada, y la tercera categoría es un híbrido entre las dos categorías mencionadas anteriormente. (De la Rosa, 1999)
Según indica el Manual de Diagnósticos de Trastornos Mentales de la Asociación Americana de Psiquiatría el 5% de niños entre 5 y 12 años de edad padece TDAH y principalmente lo padecen los infantes de género masculino. En el Ecuador se reconoce un total de 7918 niños aproximadamente con hiperactividad en los planteles educativos públicos.(Rosero, 2017)
Aquellas personas con TDAH revelan niveles disfuncionales de inatención, seguidos de hiperactividad e impulsividad. Debido al padecimiento del síndrome los individuos poseen dificultad para mantener la concentración en un trabajo determinado, no obedecen órdenes, y pierden objetos de trabajo frecuentemente, debido a este trastorno los niños presentan inconvenientes en la escuela pese a su gran inteligencia. La hiperactividad e impulsividad además circunscribe inquietud, movimiento exagerado, incapacidad para permanecer quieto, intromisión en las actividades de otras personas, y paciencia muy limitada al momento de esperar. En la niñez, el TDAH por lo general viene acompañado de diversos trastornos llamados “externalizados”, como por ejemplo el trastorno negativista desafiante y el trastorno disocial. (Sauceda & Maldonado, 2014)
En el 2011 se llevó a cabo una investigación por parte de la Facultad de Ingeniería de la Universidad de Putra de Malaysia, la misma que se enfocó en el desarrollo de una terapia psicomotriz que permita disminuir el autismo presente en niños, el procedimiento se realizó a través de la detección de emociones en los rostros de los niños generados de la interacción directa entre ellos y el robot. (Ismail, Shamsuddin, & Yussof, 2011)
En la universidad de Carolina del Sur en el 2016 se desarrolló una terapia psicomotriz para contrarrestar el autismo en los niños a través de rutinas pre programables haciendo uso de la música. En Japón se descubrió que la mejor terapia para contrarrestar trastornos que los niños pueden padecer es por medio del juego con robots, este método le permite al niño desenvolverse directamente con los avances vanguardistas de la robótica mientras mejora su comportamiento pro social. La Facultad de Ingeniería de la Universidad de Chubu en Kasugai interpretó positivamente el desarrollo de terapias dirigidas por robots al evidenciar el acercamiento directo de los niños al robot. (Suzuki & Lee, 2017). En esta investigación los niños conjuntamente con el robot realizaron pasos de baile ejecutados inicialmente por el robot. Los resultados fueron alentadores, se alcanzó un 82% de eficacia con una muestra de seis niños con autismo, en las primeras sesiones fue necesario la ayuda de un terapeuta el cual guiaba a los niños para que imitasen al robot, sin embargo, en las sesiones finales esto no era necesario ya que los niños ejecutaban por si mismos todos los movimientos establecidos. (Beer, Michelle, & Liles, 2016)
La terapia psicomotriz se dividió en tres etapas o rutinas con el objetivo de generar un lazo de amistad entre el robot y los niños. La rutina inicial involucra una presentación del humanoide NAO con los niños para la mutua interacción lo que les permite observar, analizar y manipular al robot. En la segunda rutina consiste en el seguimiento y ejecución de los movimientos corporales mientras cantan. Por último, la tercera rutina consiste en el desplazamiento del robot y el niño por una trayectoria lineal ubicada sobre el suelo. La constitución del humanoide le permite captar sin ningún inconveniente el entorno en el que se encuentre, gracias a sus dos cámaras de alta definición ubicadas en la parte frontal de la cabeza, es posible aplicar técnicas de visión artificial y con la permisividad de los veinte y cinco grados de libertad el desplazamiento en cualquier dirección es viable.(Softbank Robotics, 2013) .
En está rutina se hace uso de movimientos sincronizados en donde el robot realiza diversas coreografías, habla, escucha y se relaciona directamente con los niños. Para esto se hace uso de bloques de programación predeterminados de la plataforma computacional Choregraphe. La rutina tiene un tiempo aproximadamente de 6 minutos tiempo en donde los niños pueden apreciar la capacidad que posee el robot para desplazarse.
El objetivo de esta rutina es crear un ambiente amigable en donde los niños y el robot realicen ejercicios corporales con el fin de estimular la atención de los niños hacia el humanoide. Es aquí donde a los niños se les indica la dinámica del juego y de las diversas rutinas para una mejor ejecución.
Con el objetivo de crear un ejercicio psicomotriz que disminuya el déficit de atención e hiperactividad se desarrolló un programa de detección de líneas a través de las cuales el robot conjuntamente con el niño pueda desplazarse hasta alcanzar la meta planteada. Para el reconocimiento de líneas se implementaron técnicas de visión artificial en el robot a partir de la imagen adquirida por una de sus cámaras. Al estar ubicadas las trayectorias lineales en el suelo se seleccionó la cámara inferior del robot debido a su ángulo de enfoque como se muestra en la Fig 2.
Fig. 2
Ángulo de enfoque de las cámaras del robot
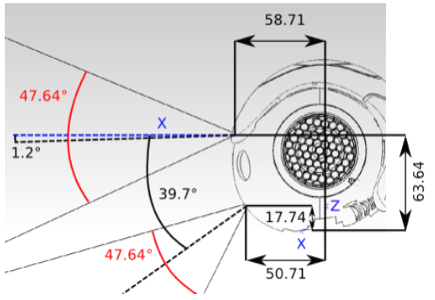
La resolución utilizada para la adquisición de la imagen es de (320 * 240) px, debido a que no es necesario una resolución muy alta para poder diferenciar trayectorias ubicadas en el suelo, además que una mayor resolución generará un tiempo más elevado para el procesamiento de la imagen por el mayor número de pixeles de la imagen.
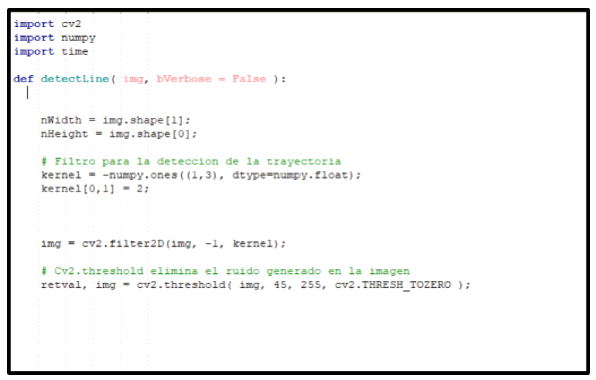
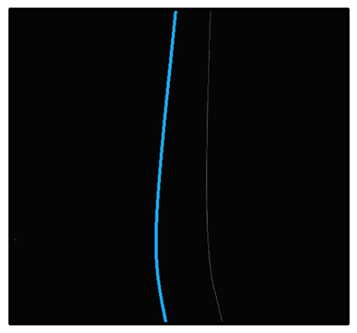
Con el fin de detectar la trayectoria es necesario aplicar un proceso de convolución a la imagen a partir de la librería Open CV, gracias al comando cv2.filter2D es posible cambiar a la imagen adquirida a un formato unidimensional como se observa en la Fig. 3 (color negro), mientras que con el comando cv2.threshold se determina un valor umbral establecido en base a la escala RGB (0-255) para resaltar los ejes de la trayectoria, una vez detectada la trayectoria es necesario tomar un eje como referencia y para esto se aplica los comandos de la librería Numpy como lo son numpy.argmax el cual en base a una comparación devuelve los valores máximos de un eje como se muestra en la Figura 4. Finalmente se emplea numpy.where y numpy.average para el desplazamiento del robot a través de la trayectoria en base a una serie de comparaciones entre los puntos finales y los puntos iniciales.
Fig. 3
Convolución de la imagen
-----
Fig. 4
Detección de un eje de la trayectoria
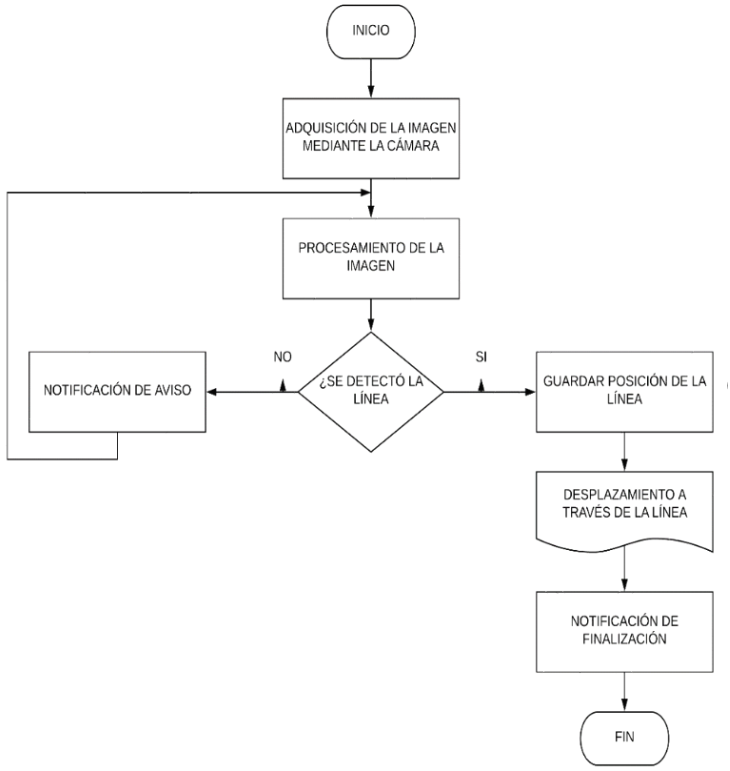
El diagrama de bloques del algoritmo que cumple las condiciones de la terapia psicomotriz se describe en la Fig. 5, de esta manera se cumple cada una de las metas trazadas con el fin de disminuir el trastorno de déficit de atención e hiperactividad presente en niños menores de 8 años a la vez que se les induce a los mismos a aprender y relacionarse directamente con los avances vanguardistas de la robótica.
Fig. 5
Diagrama de Bloques del algoritmo de detección de trayectorias
Con el objetivo de valorar el ejercicio psicomotriz desarrollado por el humanoide NAO se realizaron varias pruebas con las cuales se pudieron evidenciar varios parámetros como: el grado de aceptación que los niños mantuvieron con el robot, el desempeño de la terapia psicomotriz y el grado de atención prestado por los niños a lo largo de las rutinas desarrolladas con el humanoide NAO.
Para determinar el grado de aceptación del robot se realizaron encuestas dirigidas a los niños en donde ellos valoraron la interacción con el robot, además de eso se evidenció por el método de la observación el desempeño y la relación que los niños mantuvieron con el humanoide NAO.
El índice de aceptación del robot NAO con los niños del plantel “San Ignacio de Loyola” de la ciudad de Riobamba sobrepasa cualquier expectativa generada previo a la presentación, los niños, como se observa en la Fig. 6 mantuvieron una sensación de sorpresa al mirar a un robot con las facultades de caminar, hablar, sentarse por sí solo e incluso observar mediante sus cámaras, en ningún momento existió alguna señal de rechazo o miedo por parte de los niños al contrario se sintieron seguros de realizar ejercicios corporales o de tocar el cuerpo del robot. Uno de los aspectos que más llamó la atención de los niños fue observar los tres dedos que posee el robot, los niños no comprendían porque el robot solo posee tres dedos y no cinco, es decir en todo momento los niños compararon la morfología del robot con la de un humano esto se debe a la similitud del cuerpo del robot con la de los humanos. El aspecto amigable del robot y su clara diferencia con los humanos evita el rechazo de los infantes.
Fig. 6
Prueba de aceptación del robot NAO

En la Tabla 1 se muestra el grado de aceptación a través de los resultados obtenidos de la encuesta dirigida a los infantes. Ver Anexo A.
Tabla 1
Valoración de encuesta realizada a niños
de la escuela “San Ignacio de Loyola”
N° de pregunta |
Aceptación |
Rechazo |
1 |
100% |
0% |
2 |
95% |
5% |
3 |
100% |
0% |
4 |
100% |
0% |
5 |
90% |
10% |
6 |
100% |
0% |
7 |
95% |
5% |
Con una muestra de 8 niños con TDAH se desarrollaró la terapia psicomotriz en donde se evaluaron dos parámetros: el tiempo en el que se desarrollo la terapia, es decir cuanto tiempo les tomo a los niños finalizar la trayectoria planteada y el porcentaje del desplazamiento de los niños a través de la trayectoria. Obteniendo como resultado un promedio del 89% del desplazamiento por parte de los niños a lo largo de la trayectoria con un tiempo de 48 segundos aproximadamente. En la Tabla 2 se puede evidenciar los resultados de cada una de las pruebas realizadas con los niños.
Tabla 2
Evaluación de la terapia psicomotriz con el humanoide NAO
|
Número de Pruebas |
Cantidad de aciertos |
Cantidad de Errores |
Grado de atención (%) |
Grado de hiperactividad |
Niño # 1 |
10 |
7 |
3 |
70% |
30% |
Niño # 2 |
10 |
8 |
2 |
80% |
20% |
Niño # 3 |
10 |
8 |
2 |
80% |
20% |
Niña # 4 |
10 |
9 |
1 |
90% |
10 % |
Niña # 5 |
10 |
10 |
0 |
100% |
0% |
Niño # 6 |
10 |
10 |
0 |
100% |
0% |
Niño # 7 |
10 |
10 |
0 |
100% |
0% |
Niña # 8 |
10 |
8 |
2 |
80% |
20% |
El diseño del sistema de percepción mediante la ejecución del ejercicio psicomotriz utilizando el humanoide NAO, aplicado en actividades con niños resultó una opción factible para apoyar al tratamiento de déficit de atención con hiperactividad, debido a la favorable reacción a los ejercicios realizados por parte de los niños, considerando que lograron mostrar interés en la dinámica y culminaron las órdenes emitidas, lo cual fue evidente para los padres de familia y maestros del plantel.
Mientras los robots mantengan la diferencia entre lo humano y lo material las personas con quienes interactúan no producirá rechazo sino más bien el sentimiento será de aceptación y entusiasmo de descubrir cada uno de los usos que la robótica muestra a través de los humanoides.
Beer, J. M., Michelle, B., & Liles, K. R. (2016). Robot Assisted Music Therapy A Case Study with Children Diagnosed with Autism, 419, 420.
Beltrán, F., & Curicho, D. (2015). Diseño e Implementación De Dos Manos Robóticas, Controladas Por Teclado Y Voz Mediante Android, Para Realizar Operaciones Matemáticas Básicas En La Unidad Educativa Especializada Cotopaxi. Universidad de las Fuerzas Armadas.
Boren, M., & Liles, K. R. (2016). A Case Study with Children Diagnosed with Autism. Human-Robot Interaction, 419–420.
De la Rosa, V. (1999). Trastorno por deficit de antenciòn. Pediatria de Mexico, 6, 10. Retrieved from https://www.medigraphic.com/cgi-bin/new/resumen.cgi?IDARTICULO=32078
Ismail, L., Shamsuddin, S., & Yussof, H. (2011). Face detection technique of Humanoid Robot NAO for application in robotic assistive therapy. Proceedings - 2011 IEEE International Conference on Control System, Computing and Engineering, ICCSCE 2011, 517–521. https://doi.org/10.1109/ICCSCE.2011.6190580
Ortiz, R., & Urdiales, C. (2010). Estrategias metodológicas dirigidas a docentes de niño/as de segundo y tercer año de Educación General Básica con Trastorno por Déficit de Atención e Hiperactividad. Universidad de Cuenca.
Rosero, M. (2017). Cómo identificar el Trastorno por Déficit de Atención. El Comercio, p. 1.
Sauceda, J., & Maldonado, M. (2014). Trastorno por deficit de antenciòn. AAPAUNAM, 9. Retrieved from http://www.aapaunam.mx/assets/domi-web-nov2014.pdf
Softbank Robotics. (2013). Los robots del futuro son ya una realidad. Retrieved from https://aliverobots.com/nao/
Suzuki, R., & Lee, J. (2017). Robot-play therapy for improving prosocial behaviours in children with Autism Spectrum Disorders. 2016 International Symposium on Micro-NanoMechatronics and Human Science, MHS 2016. https://doi.org/10.1109/MHS.2016.7824238
1. ¿Cuál de los robots mostrados a continuación te parece más agradable?
2. ¿Qué emoción te causó al mirar el robot NAO durante su presentación?
Alegría ( )
Aceptación ( )
Rechazo ( )
Miedo ( )
3. El robot NAO te parece un robot amigable
SI ( ) No ( )
4. ¿Te gustaría tener un robot NAO en tu hogar?
SI ( ) No ( )
5. Te gustaría aprender el funcionamiento del robot NAO
Si ( ) No ( )
6. ¿Consideras que el robot NAO podría enseñarte cosas nuevas?
Si ( ) No ( )
7. ¿Te gustó realizar ejercicios con el robot NAO?
Si ( ) No ( )
1. Máster Universitario en Automática y Robótica en la Universidad Politécnica de Madrid, Ingeniero en Electrónica Control y Redes Industriales de la ESPOCH, Docente Facultad de Informática y Electrónica. Escuela Superior Politécnica de Chimborazo. fausto.cabrera@espoch.edu.ec
2. Ingeniero en Electrónica Control y Redes Industriales de la ESPOCH. Facultad de Informática y Electrónica. Escuela Superior Politécnica de Chimborazo. cristian.rodriguezbarba@gmail.com
3. Máster en Ciencias y Tecnologías especialidad navegación por satélite, École Nationale de l’aviation Civile, Toulouse – Francia, Ingeniero en Electrónica Telecomunicaciones y Redes, Docente en la Escuela Superior Politécnica de Chimborazo. m_zabala@espoch.edu.ec
4. Máster Universitario en Telecomunicaciones en la Universidad de la Calabria, Italia, Ingeniero en Electrónica en la Universidad de la Calabria Facultad de Informática y Electrónica, Docente en la Escuela Superior Politécnica de Chimborazo. fabricio.santacruz@espoch.edu.ec