![]() ISSN 0798 1015
ISSN 0798 1015

![]() ISSN 0798 1015
ISSN 0798 1015
Vol. 39 (Nº 45) Año 2018. Pág. 18
Viviana BERRÍO Meneses 1; Diego Fernando ALZATE Velásquez 2; Jacipt Alexander RAMÓN Valencia 3; Jairo Lenin RAMÓN Valencia 4
Recibido: 30/05/2018 • Aprobado: 12/07/2018
RESUMEN: El presente trabajo se enfoca a la implementación de la tecnología de VANT (Vehículos aéreos no tripulados) o drones en la agricultura, con el fin de estimar parámetros del cultivo y obtener otra información relevante sobre su estado de salud, en menores tiempos y de forma más eficiente que permitan tomar decisiones que mejoran la rentabilidad de los agricultores. Para esto, se seleccionó un cultivo de interés nacional como es la papa (Solanum tuberosum) y sobre este se realizó el montaje metodológico y logístico para capturar, a través de un dron de ala fija, imágenes multiespectrales de alta resolución. Las imágenes fueron capturadas con dos cámaras, una RGB (Visible) y otra NIR (Infrarrojo cercano), las cuales capturan las bandas Verde-Azul-Rojo y Azul-Verde-IR (Infrarrojo cercano). Esta configuración de bandas permitió calcular el índice de vegetación de diferencia normalizada (NDVI) para el cultivo de papa, y a través del cálculo de este índice se definieron zonas de respuesta espectral diferenciada, las cuales fueron posteriormente verificadas en campo para establecer las causas de dicha respuesta espectral. Se encontró que en zonas de índices medios y bajos (0.2 a 0.6), era evidente algún problema de desarrollo en el cultivo o la presencia de especies invasoras. Los resultados obtenidos demuestran que la respuesta espectral permite identificar características de la vegetación y problemas en el cultivo, de tal forma que se evidencia la viabilidad técnica de esta herramienta tecnológica como alternativa para pequeños y grandes agricultores que permite optimizar el desarrollo de los sistemas productivos. |
ABSTRACT: This work is intended to apply UAVs (Unmanned Aerial Systems) or drones to agriculture, with the purpose to measure some parameters and obtain other relevant information about the health of the crops, using less time and resources and in a efficiently way that allows the producers to take decisions and save money. For this, a potato crop (Solanum tuberosum) was selected, considering its importance for the national economy and culture, and the metrological and logistical procedures were defined to capture, using a fixed wing drone, high resolution multispectral imagery. To do this two cameras were used, a RGB (visible) and a NIR (Near Infrared), capturing the Blue, Green, Red and IR bands. This set of bands allow us to calculate the Normalized Vegetation Index or NDVI for the potato crop, and, through this index, define the differenced spectral response zones. To determine why there were zones with different spectral response or different NDVI values, a field observation were performed, obtaining that, where the index was medium or low (0.2 to 0.6) existed a problem in the crop health or the presence of another plants like grass or herbaceous, which compete with potato for water and sunlight. The results show that spectral response is a good indicator of vegetation characteristics and potential problems in crops, which make this technology viable as an alternative for monitoring and better planning of agriculture activities. Keywords: Near infrared, drones, multispectral imagery, NDVI |

El uso de nuevas tecnologías en la agricultura, va direccionada a mejorar la producción y disminuir los costos. La agricultura tradicional es altamente vulnerable a diferentes fenómenos de tipo climático (álzate- nicholls) y la ocurrencia de enfermedades y plagas que cada vez son más nocivas y resilientes a agroquímicos tradicionales [1].
Esta investigación busca aportar mediante el uso de una herramienta tecnológica diferente, alternativas de agricultura de precisión [10] para el monitoreo y control del desarrollo de los cultivos agrícolas, que puede ser aplicada en diferentes etapas del desarrollo del cultivo, una de las grandes ventajas radica en que permite en cortos periodos de tiempo (comparado con otros métodos convencionales) generar diferentes tipos de análisis como por ejemplo: densidad del cultivo, áreas enfermas o estresadas, micro-relieve, entre otras.
La metodología implementada se orienta a la captura de las imágenes multiespectrales de alta resolución y está estructurada por el análisis de diferentes experimentos con agrodrones ajustándolo a las condiciones propias de la zona de estudio, como: horas del día óptimas para realizar los sobrevuelos, identificación de obstáculos, altura del vuelo, numero de fotos por punto, delimitación del área en el software respectivo entre otros de no menor importancia [2].
Finalmente, se logró identificar la utilidad de esta herramienta tecnológica la cual en un área de 15 ha nos permitió llegar a los puntos focales de problemas de desarrollo de un cultivo que aparentemente se encontraba saludable, este análisis en zonas más extensas permite el ahorro de tiempo y dinero y la toma de decisiones oportunas para evitar la propagación de plagas y enfermedades a zonas saludables del cultivo, de la misma forma, esta herramienta permite mejorar las condiciones ambientales, reducir el uso de agroquímicos y aumentar la resiliencia de los cultivos, ya que la aplicación de agroquímicos se realiza de forma directa sobre las áreas que los requieren y no sobre toda la extensión del cultivo [3].
La metodología se desarrolló en dos grandes etapas, la primera relacionada con la realización de los vuelos y obtención de imágenes multiespectrales brutas (que requiere considerar aspectos técnicos, de seguridad y meteorológicos), y la segunda enfocada en el post-procesamiento y verificación en campo de los hallazgos obtenidos en las imágenes multiespectrales [5 y6].
Las cámaras utilizadas fueron del modelo Canon S100, modificadas para tomar fotografías RGB y NIR, para posteriormente aplicar el índice NDVI (solo a la imagen NIR) el cual permite identificar el nivel de estrés del cultivo y la posible presencia de enfermedades y/o problemas de desarrollo en el cultivo [7]. El esquema metodológico se puede ver en la figura 1.
Figura 1
Esquema metodológico
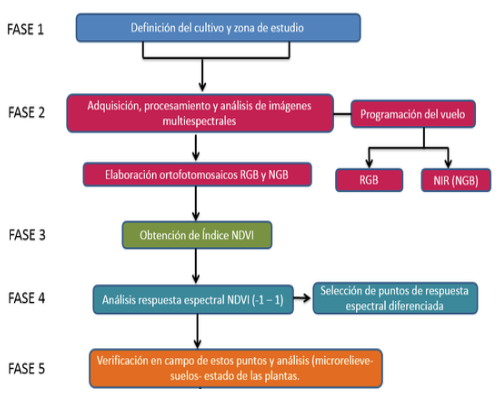
Fuente: Autores, 2015
Se consideraron 5 fases que comprenden aspectos relacionados con la realización del vuelo, captura de fotografías de alta resolución, post-procesamiento y análisis de resultados.
La fase 1 consistió en la selección del cultivo y el área a estudiar, para esto se realizaron visitas y evaluación de diferentes zonas y sistemas productivos óptimos para el análisis de imágenes y llevar a cabo los vuelos respectivos. En la segunda fase, ya con el cultivo y el área a fotografiar seleccionada, se implementó y programó el vuelo con las cámaras RGB y NIR, las cuales, una vez obtenidas fueron cosidas y se obtuvieron los ortofotomosaicos respectivos (RGB y NIR).
Sobre la ortofoto NIR del cultivo se calcula en índice NDVI como se muestra en la ecuación 1, el cual permite diferenciar con más detalle la reflectancia del cultivo e identificar zonas con mayor o menor actividad fotosintética, lo cual es indicativo del estado y nivel de estrés del cultivo (fase 4) [8].
 Ecuación [1]
Ecuación [1]
La Fase 5 consistió en visitar nuevamente el cultivo directamente sobre los puntos de respuesta espectral seleccionados en la Fase 4, y definir con base en inspección visual y conocimiento técnico del cultivo, las razones que explican la variación en la respuesta espectral obtenida.
Para la selección del cultivo se realizó un análisis de los sistemas productivos de mayor importancia en la región (Cundinamarca), así como de los impactos en los rendimientos y productividad de tales cultivos en los últimos años [8] dados por la presencia de enfermedades y plagas, deficiencias nutricionales en los suelos o deficiencias y excesos hídricos, en un contexto de cambio y variabilidad climática. Entre los sistemas productivos evaluados se encuentra zanahoria, pastos de corte, hortalizas y papa.
Se realizó un análisis técnico y económico de algunos UAV disponibles en el mercado. Entre los modelos evaluados se encuentra en DJI Phantom (cuadracoptero) y el avión MA Skywalker 2015 (Meteoagro). Ambos ofrecen sistemas de navegación completos (GPS, acelerómetros, giroscopios, magnetómetros y sensores de presión), procesadores potentes y toda una gama de radios para control y comunicación con el dron desde estaciones remotas, permitiendo la obtención sencilla y rápida de fotografías aéreas [3 -6]. Son usados en agricultura, y son adaptables a cualquier tipo de software incluyendo Windows 7/8, de la misma manera son capaces de volar de forma autónoma por medio de navegación GPS a lo largo de una ruta planificada.
Para el óptimo manejo se llevó a cabo un entrenamiento-capacitación con un simulador de drones ya que su manejo requiere un grado de experticia, previendo afectaciones climáticas u otras que puedan afectar el vuelo del dron.
A partir del UVA seleccionado se planificaron los vuelos a realizar, detallando las coordenadas a seguir durante el vuelo y usando dos cámaras (RGB y NGB). Las cámaras multiespectrales utilizadas son de alta resolución en el espectro visible (RGB) e infrarrojo cercano (NGB). Una de las características relevantes es la capacidad del sensor de captar las longitudes de onda del espectro visible y del infrarrojo cercano que son reflectadas por las plantas, el recorrido busca abordar puntos importantes del cultivo, la metodología de planificación del vuelo se realizó ajustada a los requerimientos de campo [5] Las actividades para la realización de los vuelos fueron las siguientes:
Planificación de vuelo: para la planificación del vuelo se llevó a cabo un reconocimiento del área de estudio y se definió entre otras cosas: altura de vuelo mínima (de acuerdo a los obstáculos presentes en el área como árboles, cercas, edificios, etc.), recorrido óptimo para abarcar la totalidad del área del cultivo, puntos de lanzamiento y aterrizaje del dron. Se tuvieron en cuenta datos históricos y en tiempo real de vientos en la zona, especialmente dirección predominante y velocidad (el dron debe volar cortando el viento y se debe disminuir los momentos del vuelo en que este se encuentre en contra del viento). De acuerdo a estos parámetros se definió la altura de vuelo, velocidad de ascenso y desplazamiento, inclinación de la cámara, numero de fotos en cada punto y precisión del sistema de posicionamiento, etc.
Usando el software Mission Planner se dibujó el polígono del área de influencia y se trazó la grilla del vuelo del dron. Posteriormente se escribió el vuelo programado en el computador/piloto automático del dron para que este lo siguiera durante los vuelos.
Realización del vuelo: a partir de los datos obtenidos del reconocimiento y el trazado del vuelo en el software Mission Planner, se realizó el desplazamiento hasta el sitio del cultivo con el dron y se ejecutó el protocolo de vuelo que incluyó: encendido de la telemetría del avión, activación de la ruta de vuelo almacenada en el computador del dron, revisión de correcta ubicación de waypoints y verificación de centro de gravedad del avión como se muestra en la Figura 2.
Figura 2
Verificación del Centro de Gravedad
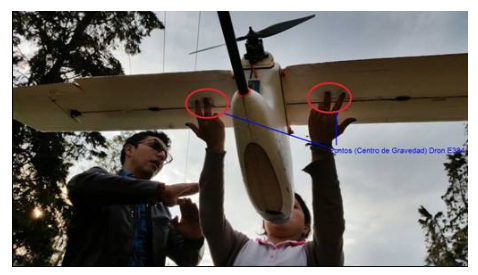
Fuente: Autores 2015
Programación de las cámaras para la captura continua de las fotos (cada 3 segundos por defecto), correcto funcionamiento de los alerones, elevadores, el timón y el motor en los modos Manual y FBWA [5]. Una vez se revisó el correcto funcionamiento del dron se procedió al lanzamiento en el modo FWBA y una vez alcanzó altura y estabilidad en el aire se colocó en modo RTL [6]. El dron ejecutó la rutina de vuelo programada y al finalizar regresó al sitio de lanzamiento para aterrizaje. Para la obtención de mejores resultados, se realizaron los vuelos de 11:30am a 1:00pm, horas del día con mayor actividad fotosintética debido a la mayor radiación solar incidente [9].
Toma de puntos de control: para la georreferenciación del ortofotomosaico generado a partir de las imágenes capturadas se tomarán 5 puntos de control en tierra como se muestra en la Figura 3, los cuales fueron traslapados con las imágenes para otorgar mayor precisión a los productos generados.
Figura 3
Ubicación de los puntos GPS
en el área del cultivo de papa
Fuente: Autores, 2015
Las fotografías tomadas y georreferenciadas incorporan datos EXIF aportados por la cámara fotográfica (coordenadas X e Y). A través de una versión de prueba del software Agisoft PhotoScan se procesaron las fotografías tomadas (inicialmente RGB y luego NGB) y se realizó la ortorectificación y creación del mosaico de imágenes a través del comando Align potos (en RGB y NGB), esta herramienta también permite realizar modelado en 3D del área y modelo digital de elevación (DEM) [5]
A través del comando Ground control, se incorporaron los puntos georreferenciados en campo (5 en total) y se procedió a mejorar la precisión de la ortofoto generada.
El índice de NDVI, como se indicó más arriba, cuantifica a través de la reflectancia, la vigorosidad de las plantas utilizando la cantidad de energía roja que es absorbida por la clorofila y la cantidad de energía del infrarrojo cercano que es reflejada por la estructura celular de la hoja. Áreas de alto vigor (densidad vegetal) poseen una mayor reflectancia en el infrarrojo cercano y una menor reflectancia en el rojo, debido a que poseen un mayor índice NDVI [4]
El mosaico NGB (Infrarrojo, Verde y Azul) obtenido previamente fue sometido a un análisis NDVI a través del software Fiji y el plugin elaborado por Ned Horning's Photomonitoring [7], asimismo se utilizó la herramienta gratuita infragram [8] la cual se encuentra disponible en internet y permite a través de unos sencillos pasos subir el mosaico NGB y procesar el índice NDVI usando los colores verde, azul e infrarrojo cercano.
La escala del índice NDVI se encuentra entre -1 y 1, de tal manera que aquellas zonas con valores más cercanos a 1 son las que tienen mayor actividad fotosintética y por ende mayor vigor. Se seleccionaron 3 puntos en el mosaico NDVI que indicaron diferente respuesta espectral del cultivo y fueron evaluados posteriormente en campo.
Los puntos seleccionados en el mosaico NDVI fueron verificados en campo, analizando las características del entorno, suelos, micro-relieve, humedad del suelo y estado actual del cultivo para establecer posibles causas que expliquen las diferencias en la respuesta espectral. Para lograr que el trabajo a realizar fuera exitoso fu necesario elaborar vuelos con diferentes modelos de UAV, Agrodron X8, Skywalker, Phantom 8, donde se precisó que por la topografía de la zona y las condiciones climáticas, el modelo que se ajustó más a los requerimientos del estudio fue el phantom 8 para el reconocimiento del área, y el skywalker para la toma de fotografías con las cámaras NIR Y RGB [10].
Se encontró que las zonas de menor reflectancia estaban asociadas a condiciones de estrés por diferentes factores de tipo biótico o físico, en comparación con las zonas de mayor reflectancia que presentaban un crecimiento homogéneo y con una buena cobertura vegetal en cada surco.
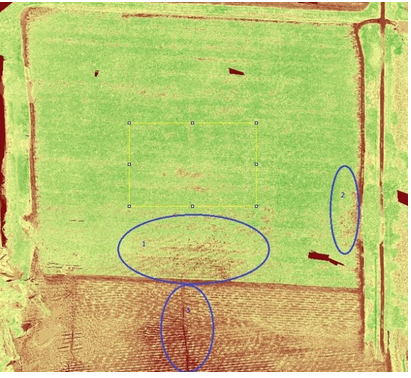
A partir de la imagen NDVI obtenida del ortofotomosaico NIR y de la reflectancia especifica encontrada (detallada en el numeral 8.5), se seleccionaron 3 zonas con posibles problemas para el cultivo de papa bajo estudio. Estas zonas se detallan en la figura 4.
Figura 4
Zonas de respuesta espectral seleccionadas para verificación en campo
Fuente: Autores, 2015
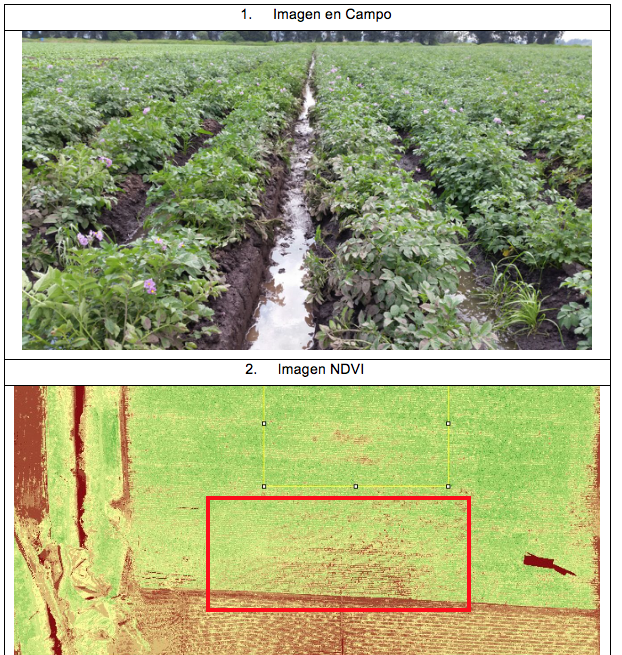
Cabe resaltar que el cultivo (en el momento de la visita) tenía un aspecto sano y uniforme, muy diferente en apariencia a lo que se observa en la Figura 5 con el índice NDVI, encontrándose áreas con tonalidades diferentes (rojas), similares a las que se visualizan en el suelo desnudo (por ejemplo las designadas como 1 y 2).
Figura 5
Vista del área del cultivo reflejando problemas del cultivo de papa
por estrés hídrico en la Zona 1 y vista desde el ortofotomosaico NDVI
Fuente: Autores, 2015.
Se contó con el apoyo de un ingeniero agrónomo del CI Tibaitatá de CORPOICA, quien proporcionó un concepto sobre el estado fenológico y fisiológico del cultivo y comprobar si efectivamente estas zonas que se encontraban tonalidades marrones y rojos (1,2, y 3) presentaban algún tipo de enfermedad por plagas como hongos, o estrés por causas biofísicas.
Se encontró un exceso de agua en cada uno de los surcos de esta área del cultivo y el suelo con una evidente saturación hídrica que genera un aspecto fangoso, de la misma manera la plantas presentaban un crecimiento tardío de 2 a 3 entrenudos, y mínima cobertura de follaje en comparación con las ubicadas en otras área del cultivo, dejando fragmentos de suelo desnudo.
Bajo estas condiciones en el cultivo, aumenta la susceptibilidad a enfermedades como gota por el Phytophthora infestans, o la rizoctaniasis (Rhizoctonia solani) estas enfermedades se propagan fácilmente en suelos con condiciones de humedad mayor al 90%.
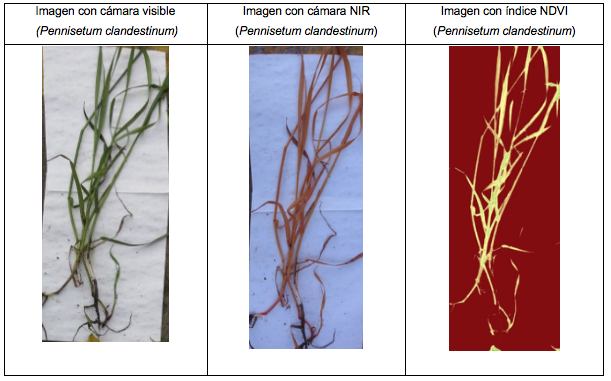
De la misma manera en el área de muestreo se encontró la presencia de gramíneas como el kikuyo (Pennisetum clandestinum), que puede provocar diferentes anomalías en el cultivo por competencia intraespecífica de las especies [13 - 11]. En la figura 6 se muestra la presencia de kikuyo en la zona 1.
Figura 6
Presencia de Kikuyo en los surcos
del cultivo de papa de la Zona 1

Fuente: Autores, 2015.
El pasto Kikuyo fue representado de forma separada como se muestra en la Figura 7, tanto con la cámara RGB, NIR y con el índice NDVI para conocer la respuesta espectral del mismo y facilitar la identificación en la ortofoto NDVI [15], indicando una tonalidad del kikuyo amarilla, como se muestra a continuación:
Figura 7
Pasto Kikuyo con cámara visible, NIR e índice NDVI
Fuente: Autores, 2015.
Algunas características y/o implicaciones de la presencia de kikuyo en el cultivo se presentan a continuación:
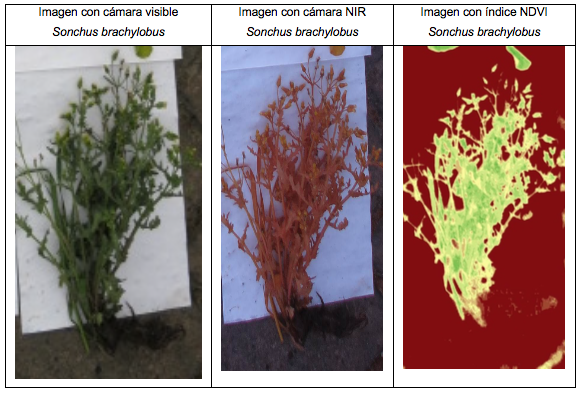
Otra especie hallada en esta zona, de comportamiento invasivo y oportunista para estas condiciones fue el Alfilerillo (Sonchus brachylobus) como se muestra en la Figura 8, especie que genera estrés por competencia en el cultivo aumentando la posibilidad de experimentar problemas de crecimiento y la susceptibilidad a enfermedades. La reflectancia de esta especie es similar a la de las plantas del cultivo de papa, sin embargo es común hallarlas en zonas con condiciones de exceso hídrico en suelos desnudos y fangosos [12].
Figura 8
Sonchus en imagen visible, NIR e índice NDVI
Fuente: Autores, 2015.
En esta zona se evidencio que las especies presentaban un desarrollo menor que el resto del cultivo (pero muy similar a las de la zona 1), con un crecimiento de las plantas de 3-4 entrenudos en promedio Figura 9, lo que indica que hay una afectación en esta zona, que puede estar generando estrés y limitando el desarrollo del cultivo.
Figura 9
Conteo de entrenudos

Fuente: Autores, 2015
En esta zona, el suelo presenta una evidente escasez de humedad y excesos de sales en su capa superficial, y se identifican indicios de clorosis en las plantas (Figura 1 0). La clorosis es generada por un exceso de sales más solubles que el carbonato de calcio y yeso afectando el crecimiento de las plantas, de [9] la misma manera afecta la absorción de nutrientes y la actividad microbiana del suelo (www.fao.org/solis-portal) [13].
Figura 10
Estado del suelo en la zona 2 (Evidente sequía, compactación y salinización)

Fuente: Autores, 2015.
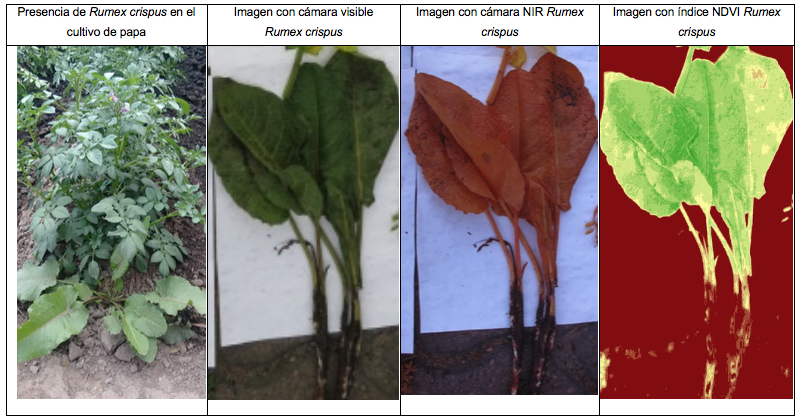
Se encontraron también en esta zona especies invasivas u oportunistas como lengua de vaca (Rumex crispus) como se muestra en la Figura 11, las cualesgeneran competencia por nutrientes y generan estrés en el cultivo, lo que lo vuelve vulnerable a la aparición de plagas y enfermedades.
Esta especie es altamente resiliente y crece en suelos salinos y con escasez hídrica. Esta especie coloniza áreas de importancia en los surcos con suelo desnudo por el crecimiento tardío de la planta de papa.
Figura 11
Presencia en el cultivo de lengua de vaca y
análisis con cámara infrarroja e índice NDVI
Fuente: Autores, 2015.
Otro aspecto que se visualizó en esta área fue la presencia de clorosis en algunas de las plantas de papa como se muestra en la Figura 12, enfermedad que está directamente relacionada con suelos calcáreos y reacción alcalina (pH 7.3 a 8.5) este fenómeno es provocado por la baja disponibilidad de algún microelemento [12] que se evidencia en la calidad y estado del suelo y el estado de crecimiento de la planta visiblemente menor en comparacion con las plantas ubicadas en zonas de mejor desarrollo y/o vigorosidad del cultivo y que presentan un mayor desarrollo y floracion.
Figura 12
Presencia de clorosis en hojas enfermas

Fuente: Autores, 2015
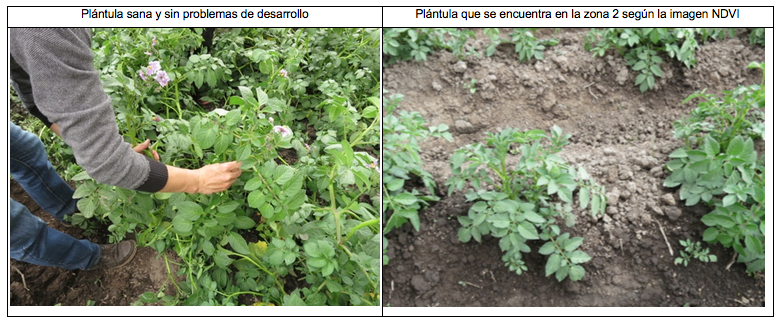
Se realizó una comparación de las especies que se encontraban en zonas de mayor vigorosidad del cultivo y las que se encontraban en la zona 2 (delimitada en la imagen con el índice NDVI), evidenciándose una clara diferencia en la fisiología de las especies, a nivel de crecimiento, pigmentación, floración, diámetro de los tallos y presencia de floración como se muestra en la Figura 13. [14]-
Figura 13
Comparativo entre una planta de papa sana y una enferma o con crecimiento tardío.
Fuente: Autores, 2015
Durante la inspección ocular de las zonas 1 y 2, y de algunas zonas de mayor desarrollo y vigorosidad del cultivo, se revisó si existía presencia de plagas como insectos o larvas que afectaran la salud de las hojas, tallos y tubérculos, en cada inspección se confirmó que las zonas de muestreo estaban libres de cualquier tipo insecto o larva.
Cabe resaltar que el manejo que se le dio al cultivo durante el estudio fue con una aplicación constante de agroquímicos, herbicidas e insecticidas que han mantenido al cultivo libre de la presencia de plagas y enfermedades, sin embargo se pudo visualizar que el suelo en algunos puntos se encuentra afectado por la aplicación de estos agroquímicos sin contar con la sobrecarga química del producto final (tubérculo) y los sobrecostos que conlleva la aplicación constante de estos químicos.
En la zona 3 se observa un canal de desagüe del predio (que atraviesa un cultivo de lechuga) como se muestra en la Figura 14, el cual desemboca la zona 1 del cultivo de papa (analizada previamente), lo cual, sumado al micro-relieve del terreno, genera una zona de exceso hídrico con encharcamiento, afectando el desarrollo y calidad del cultivo de papa.
Figura 14
Comparativo entre el área de reflectancia negativa (vino tinto)y la imagen en campo
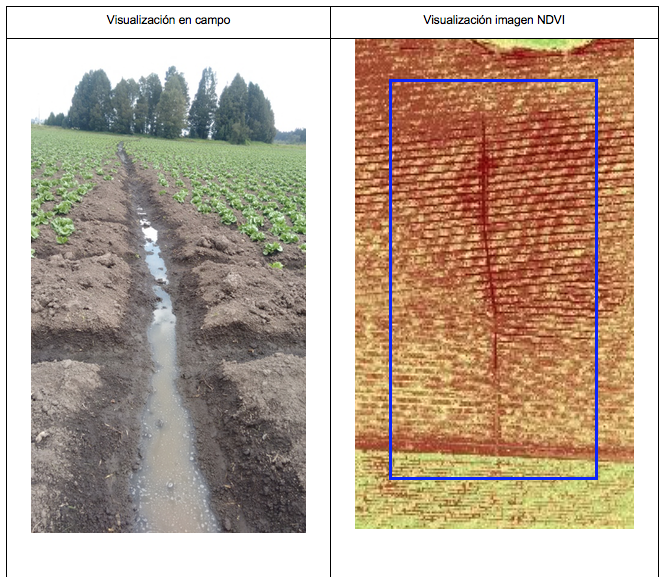
Fuente: Autores 2015
Esta área en la imagen NDVI presenta una coloración en vino tinto, que refleja zonas donde existe poca o nula actividad fotosintética, lo cual es consecuente con suelos desnudos y cuerpos de agua. Las tonalidades amarillas a verdes indican mayores valores del índice NDVI y por ende mayor actividad fotosintética (verdín).
El área resaltada en la imagen NDVI manifiesta un conducto de agua que proviene a su vez de un canal de aguas lluvia, este canal atraviesa un cultivo de lechuga Batavia colindante con el cultivo de papa con el cual se está trabajando.
Este canal puede ser un vector de propagación de enfermedades para ambos cultivos ya que por exceso hídrico o por aumento en la temperatura de estas aguas en las horas del día que más cálidas puede facilitar la propagación de microorganismos o la colonización de insectos perjudiciales para el cultivo.
Se encontró que el uso de drones es una opción viable para monitorear y diagnosticar de forma rápida las condiciones de desarrollo del cultivo de papa, ya que a través de la teledetección, el uso de cámaras multiespectrales y el índice NDVI, se identificaron 4 tipos diferentes de respuestas espectrales: zonas con vegetación saludable y vigorosa (presencia de 8 a 9 entrenudos), zonas con vegetación estresada zonas con vegetación no saludable (presencia de 3 a 4 entrenudos), y zonas suelo desnudo, mediante la intepetación de indices de NDVI los cuales se asociaban o con suelo desnudo o con problemas de crecimiento y/o presencia de plantas invasoras.
El uso de tecnologías alternativas en la planificación de agricultura para el manejo de problemas, conduce al desarrollo de prácticas relacionadas con la aplicación en exceso de agroquímicos como insecticidas y fungicidas (como medida alternativa para hacer frente al riesgo que genera la presencia de plagas y enfermedades que por esta acción cada vez son más resilientes) esto les permite a los agricultores “asegurar” la inversión de los cultivos, los aviones no tripulados representan una excelente herramienta por la facilidad de montar cámaras multiespectrales y obtener imágenes de alta resolución, las cuales permiten identificar problemas y tomar medidas en áreas puntuales de los cultivos que se encuentran enfermos.
Para la optimización de los análisis de estado y salud de los cultivos es necesario realizar sobrevuelos con buenas condiciones del clima y horas de alta radiación solar para aumentar la precisión de los datos generados en las imágenes de infrarrojo cercano.
[1] Alzate, D.; Rojas, E.; Mosquera, J; Ramón, J. (2015). Cambio climático y variabilidad climática para el periodo 1981-2010 en las cuencas de los ríos Zulia y Pamplonita, Norte de Santander, Colombia. Rev. Luna Azul. N° 40. Universidad de Caldas, Manizales, Colombia, pp. 127-153.
[2] Berrio V.A. (2015). Uso de drones como herramienta de planificación en agricultura de precisión para la detección temprana de problemas en cultivos de papa (Solanum tuberosum). Trabajo de grado para optar por el título de magister en ingeniería ambientakl de la Universidad de Pamplona. 88 p.
[3] Barreiro P. y Baguena E. (2014). Drones en la agricultura. Dossier, Universidad Politécnica de Madrid. Rev. Tierras de Castilla y León: Agricultura, Vol. 220, pp. 36-42.
[4] Esser A, Ortega R, Santibáñez O. (2002). Nuevas Tecnologías para Mejorar la Eficiencia Productiva en Viñas. Revista Agronomía y forestal. Vol. 1 (15). Centro de Agricultura de Precisión, Universidad de Chile, pp. 4-9. En http://www.puc.cl/agronomia/c_extension /Revista/Ediciones /15 /tecnologia.pdf Consultado: 20.02.2015.
[5] Espadas C. y García-Cortés S. (2014). Planificación de vuelos fotogramétricos para U.A.V sobre cliente Qgis. Universidad de Oviedo, España, pp. 1-38.
[6] Fajardo-Junco J.C. (2013). Support for precision agriculture in Colombia using images acquired from Unmanned Aerial Vehicles (UAV’s). Pontificia Universidad Javeriana, Colombia, pp. 1-7.
[7] Fernández L.G. y Chacón-Murguía, M. (2014). Adquisición y registro de imágenes aéreas multiespectrales para generación de imagenes NDVI. Electro, pp. 97-102.
[8] Flórez C. y Mosquera J. (2013). La relación ser humano – naturaleza frente a los derechos fundamentales en el territorio. Rev. Alimentos Hoy. Asociación Colombiana de Ciencia y Tecnología de Alimentos. ISSN 2027-291X, Vol. 21(28), pp. 79-96.
[9] Herwitz S., Johnson L.F., Dunagan S.E., Higgins R., Sullivan D.V., ZHENG, J. & Huamán Z. (2004). Botánica sistemática y morfología de la papa. Boletín de información técnica 6. Centro Internacional de la Papa Lima, pp. 1-22.
[10] Martínez-Cebrian M.C. (2012). Incorporación de tecnologías de información territorial en una explotación agraria de secano ante la práctica de agricultura de precisión. Centro de Investigación y Tecnología Agroalimentaria de Aragón (CITA), pp.125-132.
[11] Pérez W. y Forbes G. (2011). Guía de identificación de plagas que afectan a la papa en la zona Andina. Centro Internacional de la Papa CIP, pp. 1-48.
[12] Rodríguez V. L., Beltrán-Fonseca M.D., Lerma-Molina J.N.; Licón-Trillo L.P. (2013). Aplicación de Acido Sulfúrico en el Riego Corrige la Clorosis Férrica de los Cultivos en Suelos Calcáreos, Universidad Autónoma Chapingo. Chapingo, pp. 149-161.
[13] Torres-Sánchez, J. P. (2013). Puesta a punto de un vehículo aéreo no tripulado (UAV) para detección de malas hierbas en fase temprana: resolución especial y latura de vuelo. XIV Congreso de la Sociedad Española de Malherbología, pp. 1-5.
[14] Verdin J., Pedreros D., Eillerts G. (2003). Índice diferencial de vegetación normalizado (NDVI), FEWS - Red de alerta temprana contra la inseguridad alimentaria, Centroamérica. USGS/EROS Data Center, pp.1-12.
[15] Zarco-Tejada P.J., Guillén-Climent M.L., Hernández-Clemente R., Catalina, A., González M.R., Martín, P. (2013). Estimating leaf carotenoid content in vineyards using high resolution hyperspectral imagery acquired from an unmanned aerial vehicle (UAV). Agric. for. Meteorol, pp. 171-172-281-294.
1. Bióloga, MSc. Ingeniería Ambiental, Consultor GEI, PNUD, Bogotá, Colombia, Email: vberrio19@gmail.com
2. Ing. Forestal, MSc. Ingeniería Ambiental, Investigador Máster, CORPOICA, Bogotá, Colombia, Email: diegoalzatev@gmail.com
3. Ing. Químico, PhD. Química, Investigador PhD. Universidad de Pamplona. , Email: jacipt@unipamplona.edu.co
4. Ing. Biomédico, PhD. Ingeniería Tecnologías Industriales, Investigador PhD, Universidad El Bosque. , Email: lenninramon@unbosque.edu.co